Downdraft tables or downdraught benches are workbenches with built-in ventilation to capture dust, smoke, and fumes and draw them away from the material being worked on. They typically consist of a perforated surface whose underside is connected to a ventilation or dust collection system, to draw material through the holes and away from the work. portable downdraft operation table,grinding downdraft table,down draft table Botou Ever Lucky Environmental Protection Machinery Co., LTD , https://www.dustcontrolling.com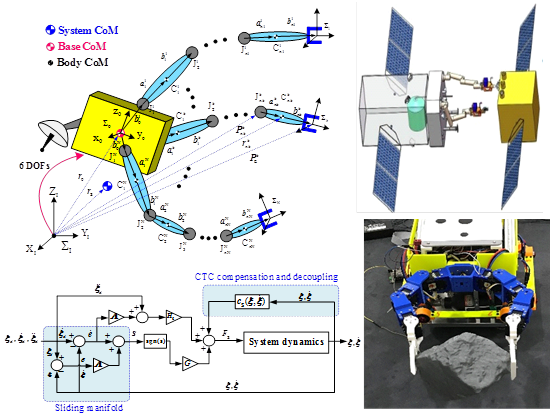
New progress has been made in the research of autonomous control technology of space robots in Shenyang Institute of Automation
[ Instrument R & D of instrumentation network ] Recently, researchers from the State Key Laboratory of Robotics and the "Space Independent Control Innovation Cross Team" of the Chinese Academy of Sciences have proposed a robotic "locking cage "The capture method, related results were published in the mechanical and electronic field journal IEEE / ASME Transactions on Mechatronics (DOI: 10.1109 / TMECH.2019.2952552).
In the space environment of strong radiation, ultra-low temperature, high vacuum, and microgravity, space robots can replace or assist astronauts to perform space missions; compared with astronauts in place, space robots are in terms of cost, safety, and operating time. Has obvious advantages. Robot autonomous control technology is the core technology to be solved in space robot research. Taking the on-orbit service of freely moving targets in space as an example, reliable target capture is the technical basis for subsequent operations.
To this end, Zhang Xin and Liu Jinguo of Shenyang Institute of Automation, Chinese Academy of Sciences proposed the use of dual-arm space robots to achieve the capture method of cage pairs. The core idea of ​​this method is to limit the target to a limited closed space, that is, robotized lock cage Medium; and put forward the concept of lock compatibility and corresponding performance indicators for quantitatively describing the ability of the cage to capture the method.
Based on this performance index, a planning algorithm for the pre-capture configuration of a dual-arm space robot is further proposed to obtain the optimal capture capability. Finally, an experimental platform of air-floating space robot was built to verify the effectiveness of the proposed capture method through experiments. The research results have important practical value in future tasks such as on-orbit maintenance and repair, space environment management, and space debris removal.
In recent years, with the support of the National Key R & D Program, the National Ten Thousand People's Plan, the Chinese Academy of Sciences Innovation Cross Team, and the Independent Project of the State Key Laboratory of Robotics, etc., in response to the needs of major missions of the national aircraft in orbit service, the autonomous control technology of space robots, Shenyang Automation Researchers of the Institute have made important progress in the on-orbit capture of space robots, on-orbit filling, intelligent control, space human-computer interaction, etc. The relevant results were published in IEEE Trans. On Cybernetics, IEEE Trans. . On Mechatronics, Nonlinear Dynamics, Acta Astronautica, Science China Technological Sciences, Chinese Journal of Aeronautics and other journals.